Can Altıneller
I am a software consultant for internet applications and I design small robots for educational purposes.
Software Consulting
I provide software consulting and deliver code in the following expertises:
Developing and software engineering of Internet and web applications, using JSP / Spring / Struts and other MVC frameworks, as well as profiling applications and tuning servers for real world use. Also Jquery and angular, and front end performance tuning.
Developing custom search/analysis/reporting applications using Lucene for indexing. Developing and interfacing custom Solr instances with glassfish. Most of those applications centered on analyzing web traffic and detecting anomalies, misuse of web content, fake crawlers, analyzing and profiling behaviors of crawlers.
Developing, configuring and customizing nutch crawler instances, as well as modifying nutch to do focused crawling.
Developing LingPipe analysis programs for bayesian classification, semantic text analysis, significant phase analysis, that are very helpful for e-commerce sites.
Implementing color or image search by image processing/segmentation and than indexing the obtained data.
When you develop a payment gateway, you expose yourself to a wide variety of fraud risks and work load. For this reason a payment gateway needs to analyze and define thresholds for credit card numbers without actually storing the credit card data. Consulting for developing built-in fraud management systems for web applications that takes advantage of Fuzzy Search, Named Entity Recognition, Bayesian Classification combined with Geo-spatial IP analysis to devise a threat score for each transaction.
Electronics Consulting
Embedded C, C++
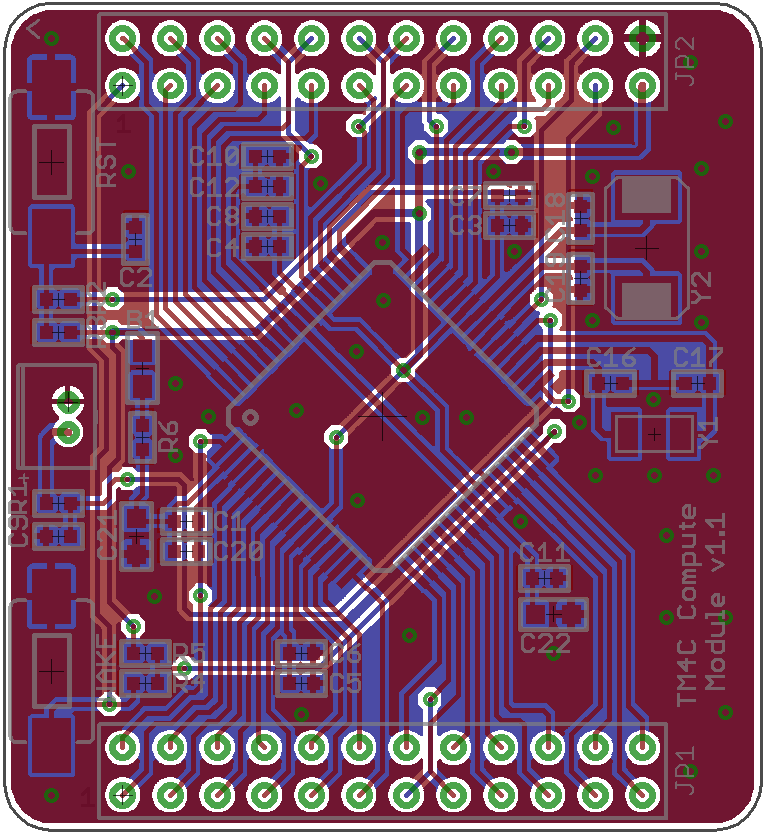
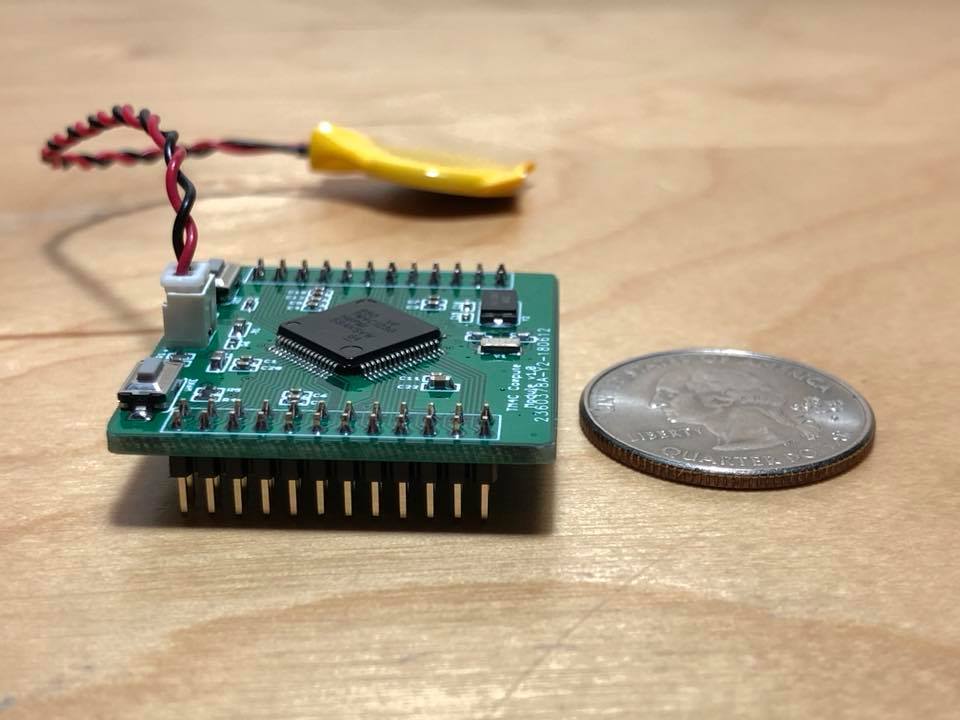
I design and build boards with Arm Cortex M4 class microcontrollers such as the TM4C123 and TM4C1209, as well as write code for them.
My open source reference Design using TM4C123GH6PM suitable for small robotics: https://github.com/altineller/TM4C123Base
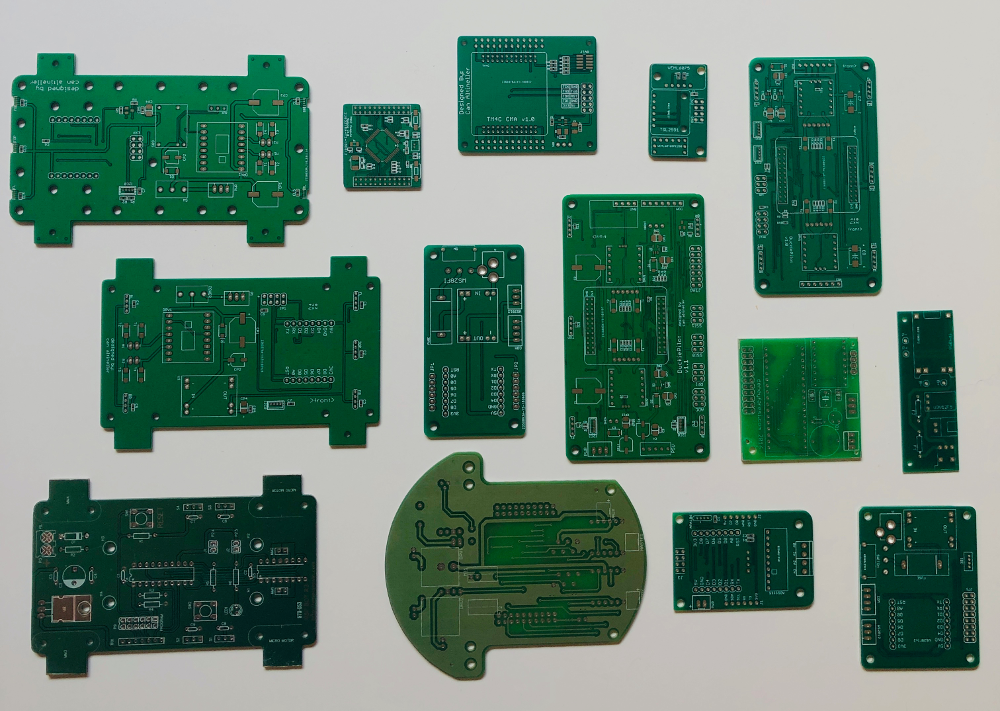
Electronics
Up until now, I built and coded for: a ros compatible robotics control board, a gps syncronized atomic clock, a sensor board for enviromental sensing, and a solar harvesting station that records all the use and harvesting data as well as battery status.
Robotics
ROS Embedded control board for robotics
My current focus on robotics is to design and develop a ros compatible control board for small robotics.
Project page is at https://github.com/altineller/DuckiePilot
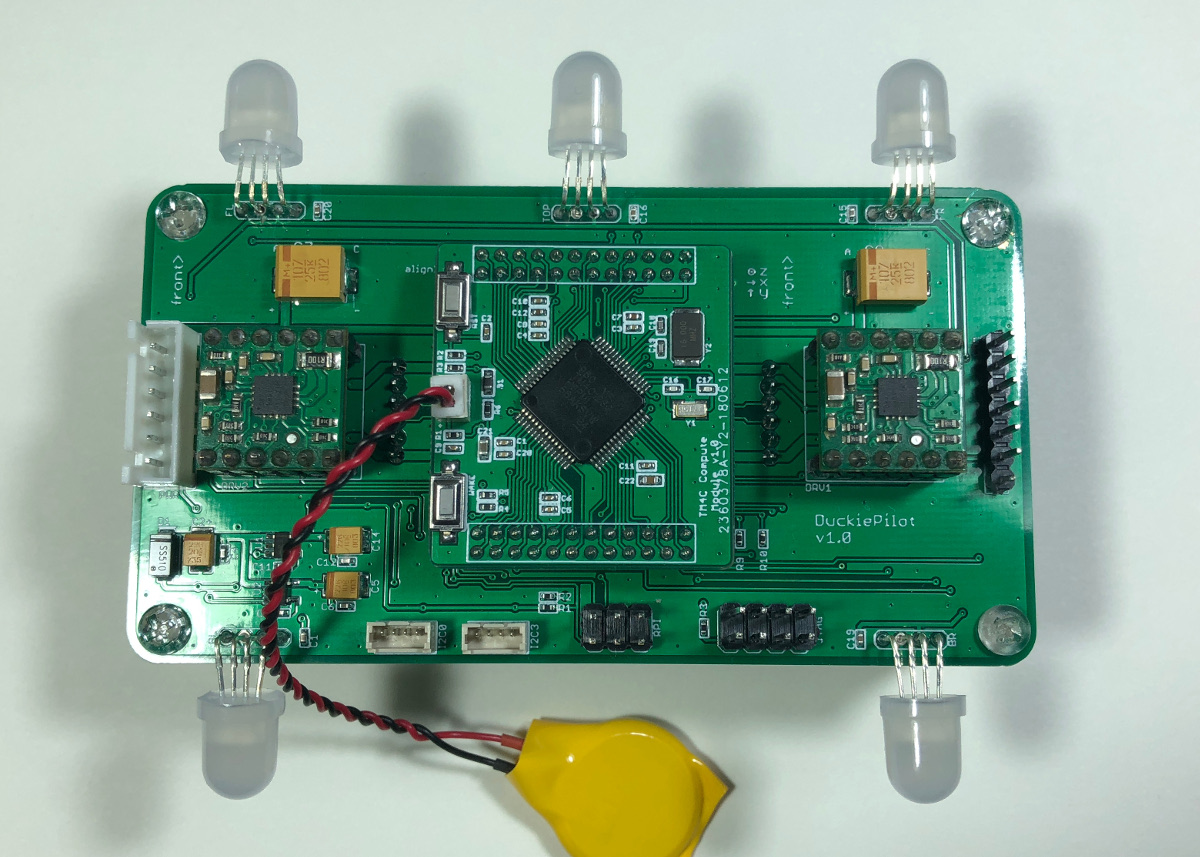
Basically, you plug this board into a usb port, and you have a ROS capable node, delivering the following:
- /cmd_vel subscriber
- /odom publisher
- /tf publisher
- /leds subscriber
- /pilotConfig service
The pilotConfig Service, configures the PID controller, and parameters of the host robot, basewidth, encoder ppr, and ticks per meter.
- float32 kP
- float32 kI
- float32 basewidth
- float32 ppr
- float32 ticks
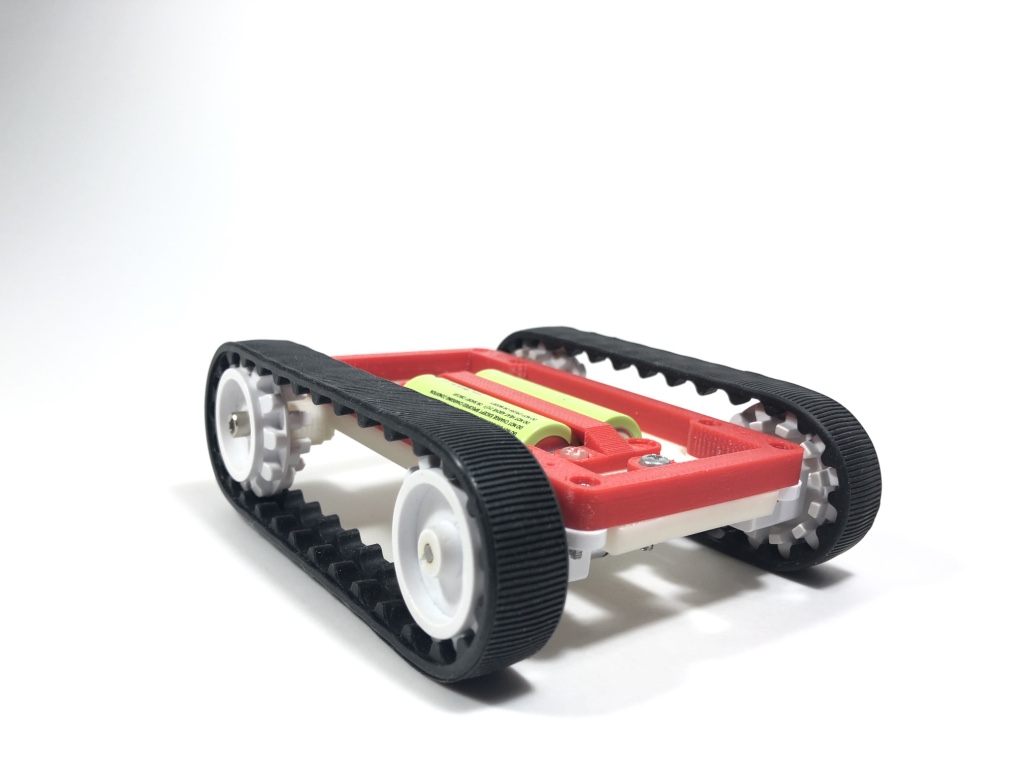
Previous designs for small robots
A self contained chassis for N20 encoder motors. The belly of the robot contains 2 18650 LiPo cells. Work in progress.
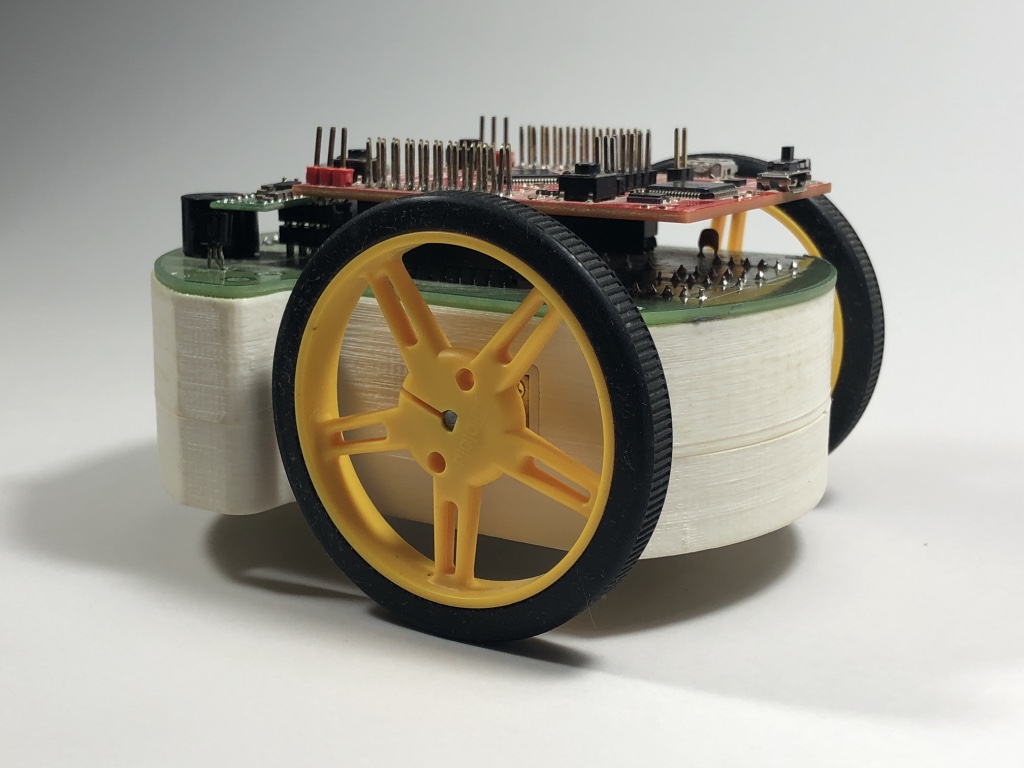
Sellobot: N20 encoder motors, with Tiva-C board. Provides odometry. Retired design, which later evolved to DuckiePilot board.
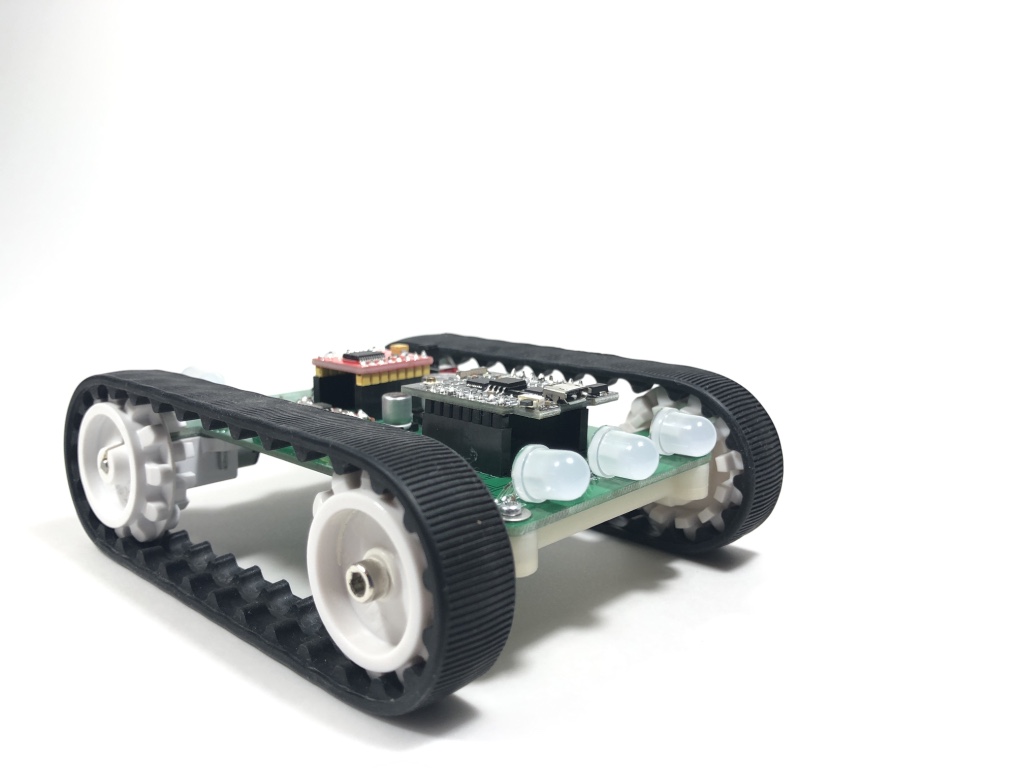
This one is a ESP8266 based robot, that uses the PCB as the chassis. Work in progress.
3D Printing
The 3D Printed Wall Train
This train is built to go on vertical platforms as well as horizontal. It was an experiment to test the limitations of 3D printing.
One micro gear motor is used to drive a set of 3d printed gears, that move all four wheels, and the motor has to provide enough power to overcome gravity. The wheels are designed to maximize friction and grip, and this is accomplished by their grooved shape and rubber coating.
Detailed blog post is available at: https://altineller.ca/post/117263513195/3d-printed-vertical-train
The 3D Printed Wall Train from Can Altineller on Vimeo.
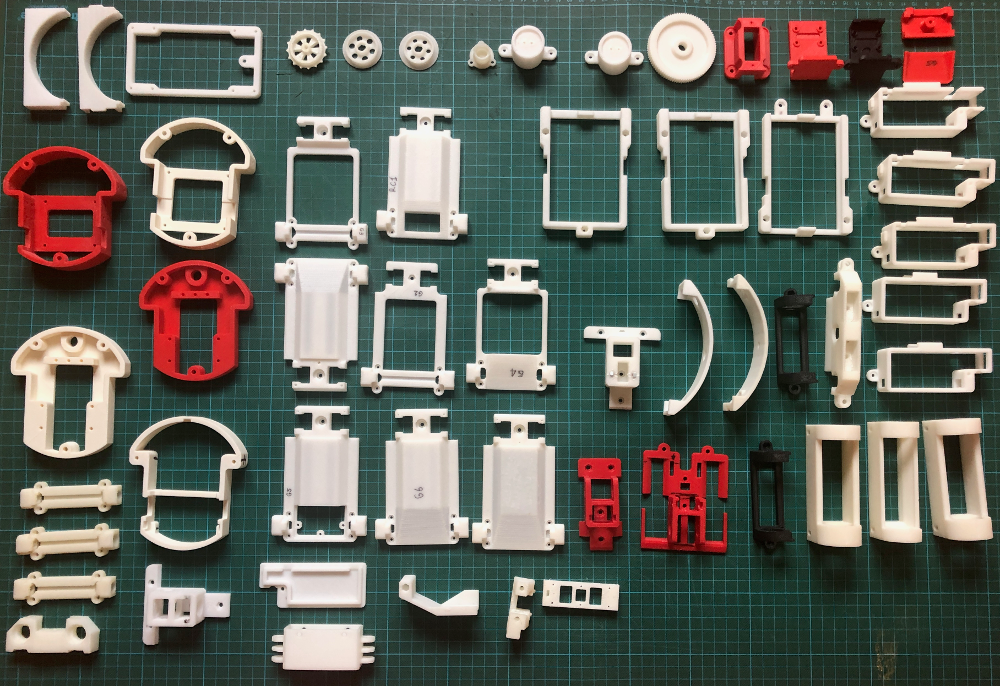
Collection of 3D printed parts
Some of the parts I have designed and printed in between 2009 and 2018. I use TierTime 3D Printers, Sketchup and Netfabb for 3d printing.
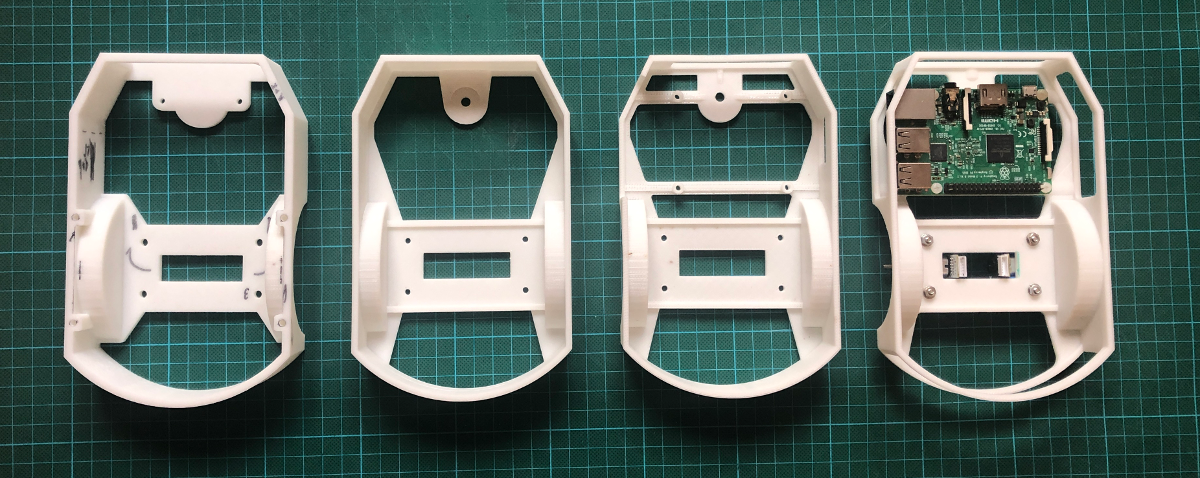
Duckiebot Chassis
My current project in 3d printing is to design and print a single piece duckiebot chassis, using the N20 motors, and duckiePilot board for control. It is a work in progress.